Subsystem Navigation
What the Navigation subsystem does
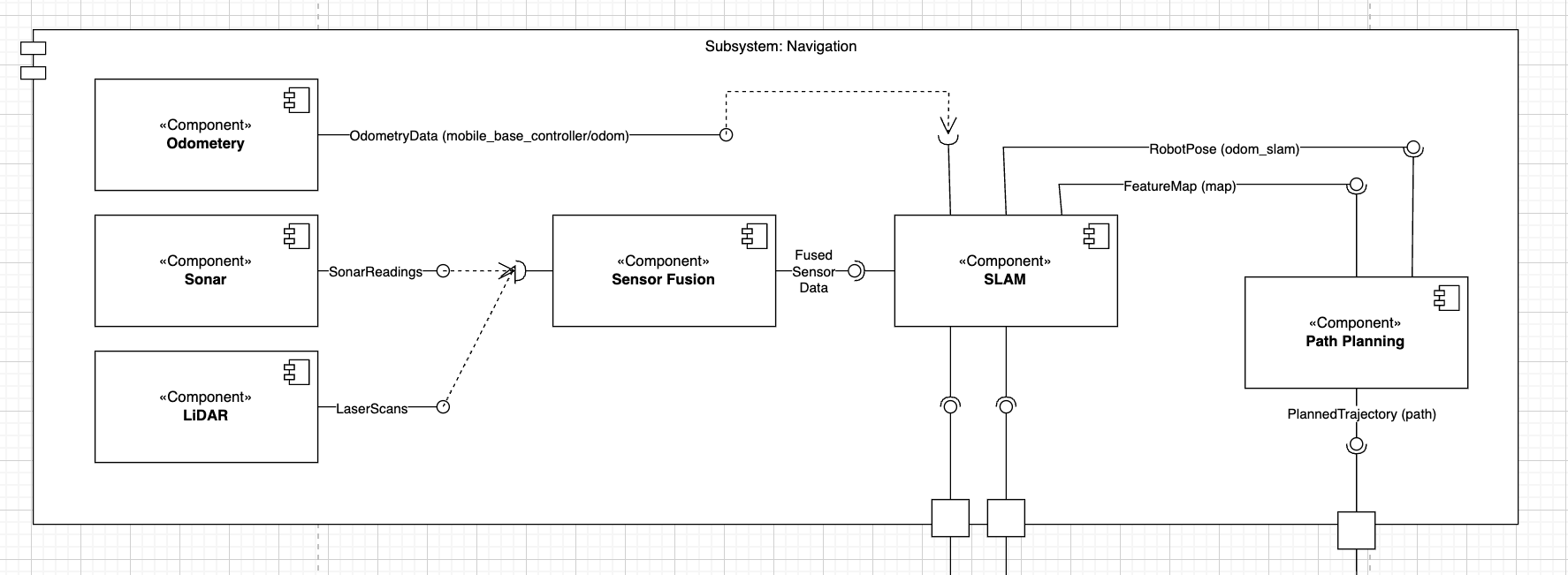
The Navigation stack answers two fundamental questions for each TIAGo robot:
Where am I? The SLAM node builds and updates a map (via /map) and estimates the robot’s pose (/odom_slam), ensuring downstream components know the robot’s location in a global frame.
How do I reach my goal? The Path Planner consumes the current map and odometry to generate a collision-free trajectory (/planned_path), handing off waypoints to the motion controllers.
To support those core functions, the subsystem also:
Scans the environment with synthetic LiDAR and Sonar sensors.
Fuses their data into a coherent cost-map (/costmap or fused scan) for obstacle avoidance.
Continuously replans if new obstacles appear or the goal moves.
Design Patterns
Strategy
In our Navigation subsystem, Path Planning uses Strategy so we can replace the dummy one-waypoint planner with A*, D*, RRT or any other planning algorithm simply by supplying a new implementation of the same interface. This keeps planning logic extensible and decoupled from the rest of the navigation flow.
Observer
Sensor Fusion subscribes to both /lidar and /sonar topics and triggers its fusion logic whenever new data arrives. This event-driven design ensures that cost-map updates and fused scans happen exactly when fresh sensor measurements are available, without expensive polling loops.
Adapter
In Sensor Fusion, the Adapter class transforms the sonar’s single scalar range into a pseudo-LiDAR scan of equal length. By encapsulating this conversion in a dedicated adapter, the fusion logic and downstream consumers remain agnostic to the sonar’s original message format.
Template Method
Our SLAM node stub implements a fixed callback flow—receive fused scan, build blank occupancy grid, publish map, publish identity odometry—while leaving the update_map(…) and update_pose(…) hooks for a real SLAM backend to override. This ensures a consistent processing pipeline and simplifies integration of a full SLAM solution later.
Facade
Our SLAM node is exactly Facade: it hides all the real mapping, pose-estimation and TF bookkeeping behind a simple interface (/map, /odom_slam). Downstream code never needs to know whether we’re running RTAB-Map, GMapping or our blank stub—just publish a scan, and a map & odometry appear.
Factory
In each Navigation node (e.g. lidar.py, sonar.py, path_planning.py), we factor the setup of ROS publishers, subscribers and message constructors into small helper functions. That way, if we need a different message type or QoS settings, we change only the factory, not every callback.
Chain of Responsibility (Pipeline)
Our Sensor Fusion logic is effectively a fusion pipeline—LiDAR → Adapter → merge → publish—where each stage handles part of the work. We can insert new fusion strategies (e.g. a Kalman filter) into the chain without rewriting the entire node.
Component roles
lidar.py - Synthesises a sensor_msgs/LaserScan at 10 Hz over 180°; acts as a stand-in LiDAR sensor.
sonar.py - Publishes sensor_msgs/Range (ultrasound) at 10 Hz; used for short-range obstacle detection.
sensor_fusion.py - Observes /lidar and /sonar, adapts sonar via the Adapter pattern, merges the two scans element-wise, and republishes a fused LaserScan for downstream cost-map consumers.
slam.py - Facade/stub for SLAM: subscribes to fused scans, generates a blank nav_msgs/OccupancyGrid and an identity nav_msgs/Odometry, and publishes both on /map and /odom_slam. Hooks (update_map, update_pose) are provided for real mapping and localization.
path_planning.py - Implements a dummy global planner using the Strategy pattern: when both map and odometry are available, publishes a one-waypoint nav_msgs/Path at 1 Hz on /planned_path.
ROS interfaces & KPIs
Topic / Service |
Type |
KPI / Note |
|---|---|---|
`/lidar` |
sensor_msgs/LaserScan |
10 Hz, 180° sweep; ≤ 50 ms sensor latency |
`/sonar` |
sensor_msgs/Range |
10 Hz, single-beam; near-range obstacle detection |
`/fused_scan` |
sensor_msgs/LaserScan |
Fusion ≤ 100 ms after new sonar or LiDAR input |
`/map`, `/odom_slam` |
nav_msgs/OccupancyGrid, nav_msgs/Odometry |
Map update and odometry publish ≤ 200 ms after fused scan (stub meets immediately) |
`/planned_path` |
nav_msgs/Path |
First waypoint ≤ 0.5 m from robot; replanning ≤ 300 ms after cost-map change |
Implementation modules
Click a component to view its API and internal documentation.
Navigation Components