Subsystem Server
What the Server subsystem does
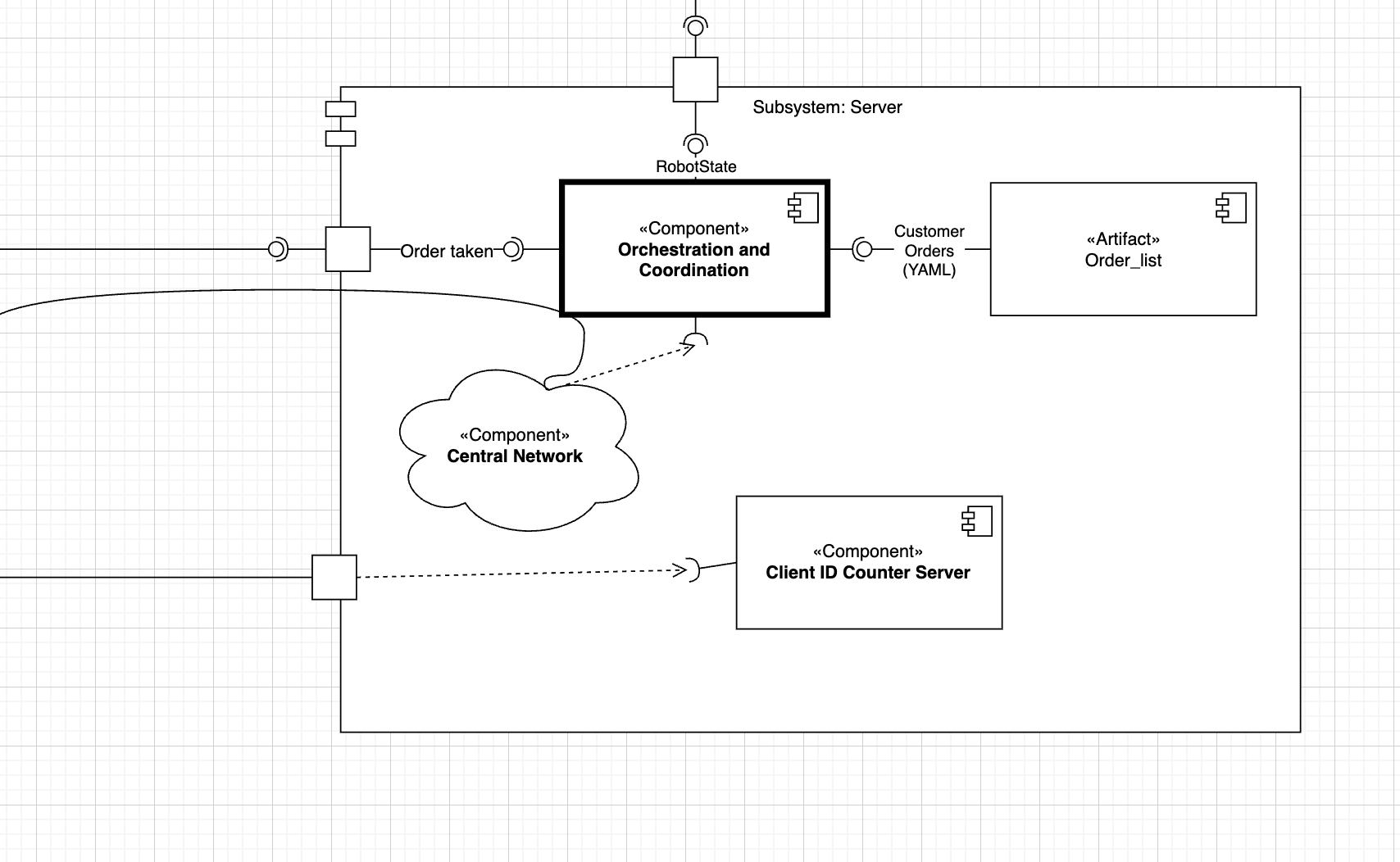
The central Server component, orchestration_and_coordination.py, manages the global workflow across all TIAGo robots:
Order ingestion Exposes /robot_state_decision_add (tiago1/send_order) so that verified orders arrive and are appended to a persistent FIFO (tiago_data.yaml).
Order dispatch Implements /robot_state_decision (tiago1/robotstatedecision) which robots call with their current state (Free, Wait, etc.). - If the robot is Free and the queue is nonempty, the server pops the next order and returns it with Busy. - If the queue is empty, returns Wait. - If the robot is already Busy, acknowledges without popping.
Persistence & resilience All changes (adds/removes) are flushed immediately to YAML. On restart the server recovers the queue in <1 s, and a corrupted file triggers automatic reconstruction from a backup.
Design Patterns
Singleton
In our server, the OrderQueue class wraps all YAML I/O and in-memory queue state. By making it a singleton, every service callback, recovery routine and backup handler uses the same instance, preventing concurrent writes and ensuring consistency across the node.
Strategy
Currently the server uses a FIFO strategy (FirstInFirstOutStrategy), but by abstracting dispatch logic into a pluggable DispatchStrategy interface, we could swap in a priority-based strategy (e.g., urgent orders first) or round-robin across tables without touching the service handlers themselves.
Template Method
- The ServiceHandler base class in the server defines:
authenticate & validate request
execute (add or dispatch)
format and return response
By overriding only the execute() hook for AddOrderHandler and DispatchOrderHandler, we enforce a consistent flow—validation, execution, persistence, response—for both services.
Command
Every incoming send_orderRequest or robotstatedecisionRequest is wrapped in a Command subclass (AddOrderCommand, DispatchOrderCommand) with an execute() method. This allows uniform logging, retry logic, or queuing of failed commands without duplicating service code.
Observer
The OrderQueue singleton notifies registered observers (e.g., a backup manager, a metrics logger) whenever an order is added or removed. Observers then perform side‐effects—writing backups, updating monitoring dashboards—automatically, keeping the core queue logic free of ancillary concerns.
ROS interfaces & KPIs
Service / Topic |
Type |
KPI / Note |
|---|---|---|
|
|
≥ 99.9 % success, response < 100 ms; returning Busy only when queue ≥ 1 |
|
|
YAML write < 50 ms, supports ≥ 20 req/s |
|
YAML |
Survive restart; corruption detection & recovery < 1 s |
Data life-cycle
Order added – send_order service appends to in-memory queue and saves YAML.
Robot query – robotstatedecision service reads queue head and robot state: - Free → pop & return order + set Busy. - Wait or empty queue → return Wait.
Persistence – every mutation triggers an immediate YAML flush.
Recovery – on startup, existing YAML is loaded; if malformed, a backup is restored or recreated.
Implementation module
Full API documentation:
Server Component